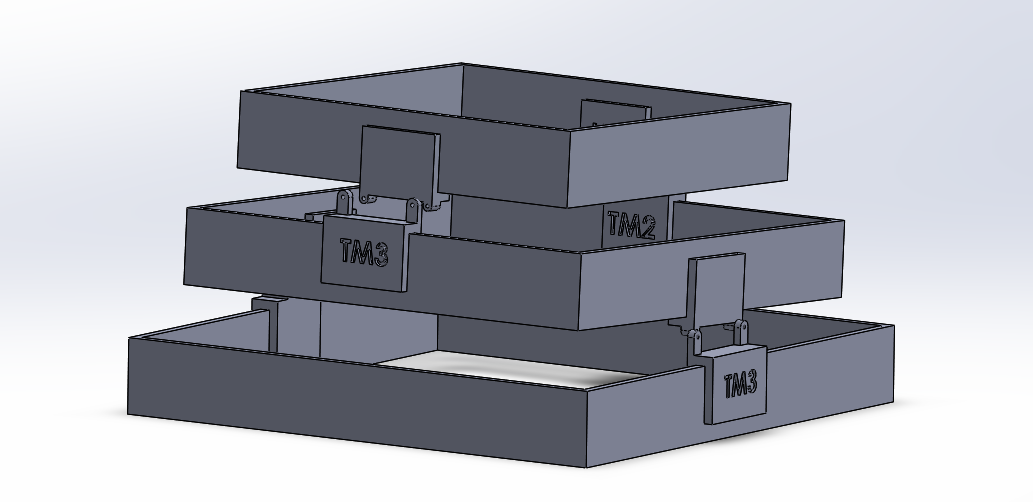
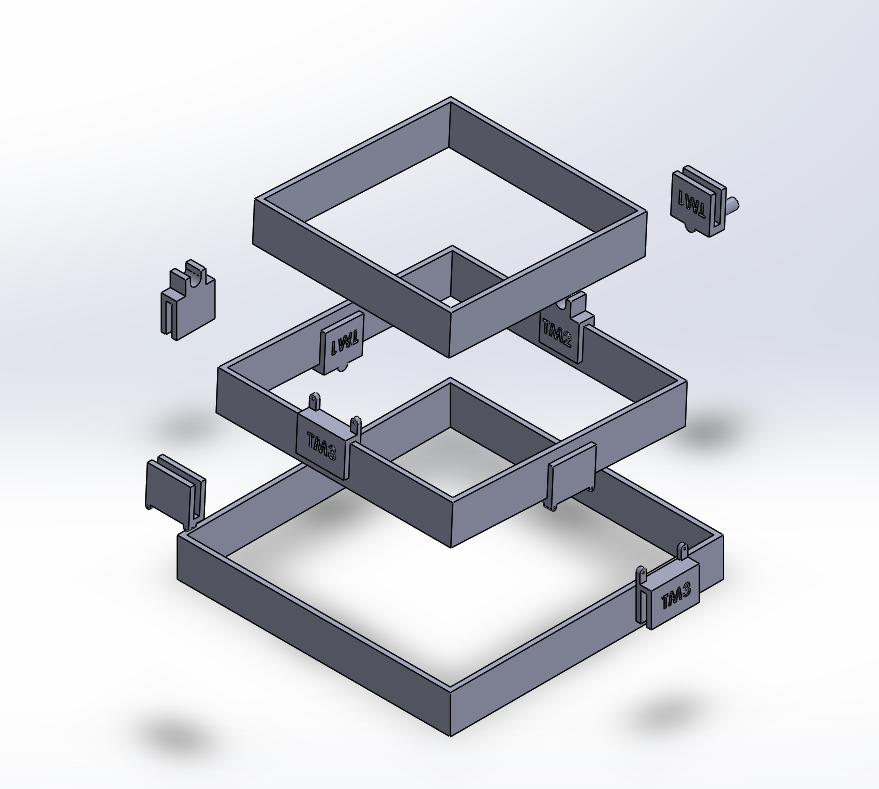
This week the assembly of the final project was completed in solidworks, following the finalization of our design. The parts are ready for printing, we are just meeting once more to confirm there is nothing else we need to add and to confirm that the total volume of the parts, with support structures, are under the four cubic inch limit. We are still rounding up the last of the extraneous materials for the project.